































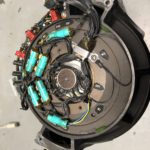













Update: If you look carefully you will notice I was disassembling the backplane wiring. This was actually being done on a separate, scrapped unit. I still have the fully intact IMU in the photos.
The reason I was removing wires is because there is virtually no information or documentation available for this unit. The Technical Orders (manuals) are not released to the public. Since the wiring is extremely dense and in layers, the only way for me to trace it out and reverse engineer this unit is to carefully remove each wire and mark what it connects to.
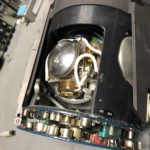
You may consider this insane and hopeless, but at this point I am able to power up the unit, get the gyros to spin, the platform to erect and respond to movement and see data output. I found a photo of the control head and have identified (sort of) how it interacts with the unit at a high level. Next I will start the ALIGN process where the unit carefully measures accelerations from the stabilized platform to determine the unit orientation in reference to true north. Apparently this can take 15 minutes and I will monitor the completion signal “Ready to Nav”.
The data buses will take some work to figure out as the unit does not just spit out all the internal data, you have to request it. There are no microprocessors in this thing, it is just a large collection of state machines with logic that resembles the backplane wiring – spaghetti. I do see 3 phase roll and pitch synchro outputs and can even drive a small 26 volt synchro and have it move when I pick the IMU up and move it about.
Powering this thing was a little bit of a challenge. It needs 120 volts 400 Hz 3 phase power. I tried, you can’t get away (at least not easily) running it on single phase 400 Hz even though the gyros and all electronics are run from a switching power supply that runs from 32 volts DC rectified from the 3 phase as there are some reference signals based on the phases.
I have an old 750 VA 3 phase inverter. Hooked it up with a 30 amp 28 volt DC supply and it promptly fried one of the power bridges. Big germanium transistors! I eventually troubleshot it to the startup surge taking enough current to collapse the DC supply and the low input voltage to the inverter was what killed it. Now I have two big supplies feeding into the inverter and it runs well.
To start the IMU, first I turn on the 3 phase power. Then I momentarily apply 28 volts DC to a pin and the internal power relays pull in and latch. There is an input line which must be grounded to enable gyro spin (this seems to be the standby/operate line from the control head). After about 45-60 seconds the gyros stabilize and the platform is enabled and erects itself.
I have identified the ALIGN input which causes a precision leveling of the platform and precise measurement to determine earth’s rotation and hence true north. That will be next and I watch for a signal which indicates completion.
By the way, the mating connectors were a challenge to find as they are a discontinued size and contact configuration. I finally found someone who could identify them and supply them at surplus prices (both normal and A rotation, too!).